2025-05-30 HaiPress
자율주행 센서의 ‘다른 그림 찾기’ 실력
압도적 성적으로 세계 1위 기록
건설 현장 등에서 정확한 이동 가능
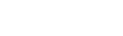
명현 KAIST 전기및전자공학부 교수 연구팀이 개발한 프레임워크. 시간이 지나 변화한 구조물(빨간 부분)을 정확하게 잡아낸다. [사진=KAIST] 명현 KAIST 전기및전자공학부 교수 연구팀이 미국 애틀랜타에서 열린 2025 IEEE 국제 로봇 및 자동화 학술대회의 NSS 챌린지에서 압도적인 성적으로 종합 1위를 차지했다.
국제 로봇 자동화 분야에서 가장 유명한 이 챌린지는 자율주행 센서의 ‘다른 그림 찾기’ 실력을 평가한다. 건설이나 산업 환경처럼 구조 변화가 많은 곳에서 자율주행 센서(라이다)가 수집한 데이터를 얼마나 정확하게 비교하고 분석하는지가 중요하다.
명현 교수가 이끄는 ‘어반 로보틱스랩팀’은 여러 시간대의 스캔을 정확하게 통합하고 분석하는 ‘다중 정합 프레임워크’를 자체 개발해 다른 연구팀보다 월등한 성적을 기록했다. 센서 오차가 0.28m에 불과해 높은 정확도를 보였다. 2,3위를 차지한 중국 서북 이공대와 대만국립대는 센서 오차가 8~9m에 달했다.
로봇이 움직이려면 주변 지형지물을 정확하게 파악해야 한다. 건설 현장 같은 곳은 시간이 지날수록 변화가 많은데,어디가 어떻게 달라졌는지를 알아야 사고 없이 정교하게 움직일 수 있다.
이 기술은 자율주행차,자율로봇 등 다양한 자율 시스템의 핵심 요소다. 명 교수는 “서로 다른 스캔 사이의 상대 위치를 정밀하게 추정하는 성능을 극대화해 학문적 가치와 산업 응용 가능성을 동시에 입증했다”고 설명했다.

왼쪽부터 김대범 박사과정(팀장),이승재 박사과정,장서연 박사과정,공제이 석사과정,명현 교수. [사진=KAIST]
2026년 타이안시 문화관광 산업 고품질 발전 대회가 닝양에서 개막했다.
핵심 프로젝트의 추진 속도와 효율성을 높여 농촌 녹색 산업의 새로운 동력을 활성화한다
중국, 제4회 텐진 국제 해운 산업 박람회, 인공지능(AI) 기회에 주목
중국동방항공, 글로벌 생태문명 건설 포럼서 지속가능경영 실천 사례로 주목받아
2026 국제청소년교류대회 겸'빈기창세계'경제무역매칭회 참석자, 빈저우시 빈성구 현지조사 실시
중국동방항공, AI 기반 항공·철도 연계 서비스 업그레이드… 원스톱 예약 및 최적 이동 경로 추천 제공