2025-06-03 HaiPress
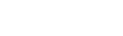
KAIST 연구팀이 개발한 사족보행 로봇 라이보. [KAIST] 한국과학기술원(KAIST)이 복잡한 지형을 고속으로 이동할 수 있는 4족 보행 로봇 ‘라이보(LyROBO)’를 개발했다. 황보제민 기계공학과 교수 연구팀은 계단,벽,틈,잔해 등 불연속 지형에서 초속 4m(시속 14.4km)로 이동할 수 있는 4족 보행 로봇 내비게이션 프레임워크를 구현했다고 3일 밝혔다.
복잡한 지형에서 로봇이 안정적으로 목표 지점에 도달하려면 발 디딤 위치를 정확히 계획하고 따라야 한다. 연구팀은 발 디딤 위치만을 탐색 공간으로 삼아 기존 방식보다 계산량을 획기적으로 줄였으며,고양이처럼 뒷발이 앞발 자리를 따라 디디는 구조를 도입해 효율성을 높였다.
연구팀이 이번에 개발한 트래커는 점진적으로 어려운 난이도에 적응할 수 있도록 설계했다. 또 학습된 트래커의 특성과 성능을 반영할 수 있도록 트래커가 실행 가능한 디딤 위치 계획을 생성하는 샘플링 기반 플래너도 만들었다.
이런 계층적 구조는 기존 기법 대비 계획 속도와 안정도 모두에서 우수한 성능을 보였다는 게 연구팀의 설명이다. 특히 연구팀은 다양한 장애물과 불연속 지형에서 고속 보행이 가능하고 처음 보는 지형에 대해 범용적으로 적용할 수 있음을 실험을 통해 입증했다고 밝혔다.
황보 교수는 “기존에 상당히 큰 계산량을 요구하던 불연속 지형에서의 고속 내비게이션 문제를 오직 발자국 위치를 어떻게 선정하는가의 간단한 관점으로 접근해 획기적으로 개선했다”며 “로봇이 재난 현장 탐색이나 산악 수색 등 실제적 임무를 수행하는 데 이바지할 수 있을 것으로 기대된다”고 말했다.
의상에 깃든 풍아, 국풍은 산해를 넘다: 조현 한푸 해외에서 인기 폭발 특색 산업으로 당 창립 105주년을 경축하다
칠일 당절 맞아 붉은 문화 행사 활발 조현 붉은 테마 공연복 시장 인기 상승
‘청량 경제’, 중국 둥잉시 여름 소비시장에 새로운 활력 불어넣어
둥잉시, 2026년 ‘우리의 명절·단오’ 테마 문화행사가 열려
둥잉 단오 민속문화 교류행사, 한국서 개최
후이민현, 중·한 우호 학교 교류 활동 전개